很多游戏中需要实现自动寻路功能,在连续的地图坐标中搜索路径,需要分为两步,首先是离散化,再进行路径搜索。本文主要讨论路径搜索算法 Jump Point Search,以下简称 JPS。
在不考虑地图预处理的情况下,JPS 是基于格点的八方向寻路的最佳选择。为了理解 JPS,首先需要了解 A* 算法。
A* 搜索算法
A* 搜索算法,俗称A星算法,是很多寻路算法(包括JPS)的基础。该算法综合了 Best-First Search 和 Dijkstra 算法的优点:在进行启发式搜索提高算法效率的同时,可以保证找到一条最优路径。
Dijkstra 算法使用广度优先搜索解决赋权有向图的单源最短路径问题,可以找到两个顶点之间的最短路径。对于任一顶点 v,d[v] 表示从起点 s 到 v 的最短距离,显然 d[s] = 0,用 w[u, v]表示u到v的直达距离。该算法从原点s开始扩展,每一次针对顶点u,遍历其所有出边[u, v],若d[v]>d[u]+w[u, v],则将d[v]赋值为d[u]+w[u, v]。算法直至所有顶点都扩展过为止。下面的伪代码计算图G中原点s到每一顶点v的最短距离d[v],并且保留v在此最短路径上的前趋顶点,以回溯出最短路径。算法维护两个顶点集合S和Q,集合S保留所有已知最小d[v]值的顶点v,集合Q则保留其他所有顶点。
|
|
如果只需在s和t之间查找一条最短路径的话,可以在第9行添加条件,如果满足u=t,则终止程序。下面的伪代码通过回溯,找出s到t的最短路径。
|
|
可以看出,Dijkstra 算法在搜索时并不考虑终点的位置,而是盲目的搜索,因此效率并不高。贪婪最佳优先搜索解决了该痛点:在Dijkstra算法中,优先队列(即上面的Q)采用的是每个顶点到起点的距离排序,而贪婪最佳优先搜索中采用每个顶点到目标顶点的距离(一般可以用曼哈顿距离描述)进行排序。这里运用启发式思想,从搜索开始就向目标点方向优先搜索,在障碍物较少的情况下速度足够快,但路径不是最优。
如果用g(n)表示从起点到任意顶点n的实际距离,h(n)表示任意顶点n到目标顶点的估算距离,那么g(n)和h(n)就是Dijkstra算法与贪婪最佳优先搜索算法在顶点排序时分别使用的评估函数。而A*算法使用的评估函数为:
f(n) = g(n) + h(n)
这个公式具有以下特性:
- 如果g(n)为0,即只计算任意顶点n到目标的评估函数h(n),而不计算起点到顶点n的距离,则算法转化为贪婪最佳优先搜索算法;
- 如果h(n)不高于实际到目标顶点的距离,则一定可以求出最优解,而且h(n)越小,需要计算的节点越多,算法效率越低,常见的评估函数有——欧几里得距离、曼哈顿距离、切比雪夫距离;
- 如果h(n)为0,即只需计算起点到任意顶点n的最短距离g(n),则转化为Dijkstra算法。
优化 A*
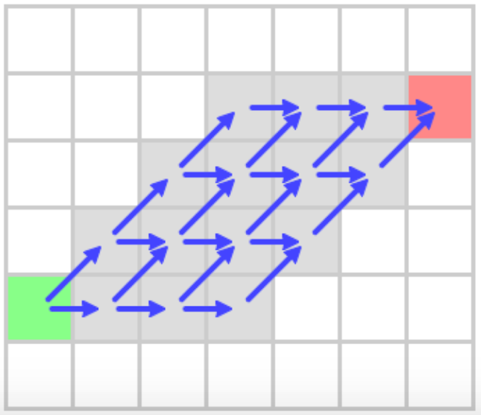
在两点之间的最短路径中,可能存在多条走法不同但长度相同的路径,这样的路径被称为是“对称”(symmetry)的,如下图所示。盲目搜索这类对称路径将严重影响搜索效率,而A*无法识别对称路径。作为目前最常用的寻路算法之一——JPS能够有效识别对称路径,并跳过它们。在40*40大小的格点地图上,A*算法找到一条最短路径大约需要180.05ns,而JPS只需15.04ns[1]。
在基于格点的八方向寻路地图中,用$\vec{d}$表示八个方向之一(上、下、左、右等)。当从x开始沿着$\vec{d}$移动k个单元可以到达y时,可以表示为$y=x+k\vec{d}$。当$\vec{d}$为对角线移动时,将与$\vec{d}$ 45度的两个直线移动表示为$\vec{d_1}$和$\vec{d_2}$。路径$\pi=<n_1,n_2,…,n_k>$表示从$n_1$到$n_k$的无环顺序移动,$\pi$\x表示节点x不在路径中。len函数和dist函数分别表示路径的长度与两个节点之间的距离,如$len(\pi)$或$dist(n_0,n_k)$。
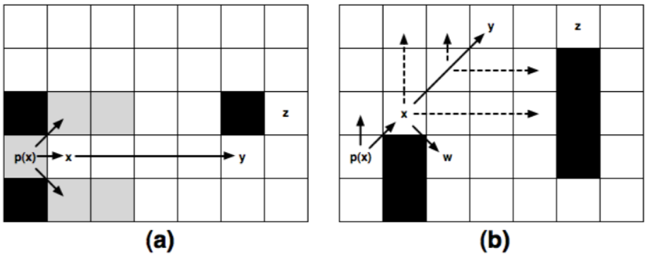
如上图所示,节点x的父节点为p(x),当扩展x时,去考虑灰色的节点是没有意义的,因为从p(x)到达这些节点的路径在不包含x时更短,称这些灰色节点是劣性的。这时只有x右侧的邻居需要评估,但与A*算法直接将它加入开放列表不同,由于y拥有至少一个非劣节点(z),JPS算法会继续向右推进直到y。当找到一个y这样的节点(跳跃点),将它作为x的后继者,并赋于它g值,g(y)=g(x)+dist(x,y)。如果在前进过程中遇到障碍物,则当前方向的搜索失败。由此可见,JPS主要有两个优化策略:裁剪与跳跃。
针对节点x的邻居,裁剪的目的是识别其中的劣性节点,可以通过比较两条路径的长度来判断是否需要裁剪:从p(x)开始访问x到n结束的路径$\pi$,和从p(x)不经过x到n结束的路径$\pi’$。此外,$\pi$和$\pi’$中的节点都属于neighbours(x)。从p(x)到x是直线移动和对角线移动的两种情况需要不同的处理,如果x是起点,则不进行裁剪。
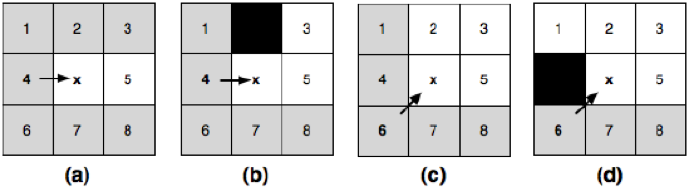
- 直线移动:对满足以下条件的任意结点$n\in neighbour(x)$进行裁剪,如下图(a)所示,需要裁剪除了n=5之外其他x的邻居。
len(<p(x),…,n>\x) <= len(<p(x),x,n>)
- 对角线移动:与直线移动唯一的区别在于这里需要严格的不等关系,如下图(c)所示,需要裁剪除了n=2、n=3与n=5之外的邻居。
len(<p(x),…n>\x) < len(<p(x),x,n>)
如果neighbours(x)不包含障碍,裁剪过后的结点被成为x的自然邻居(natural neighbours),如上图(a)和上图(c)中的非灰结点。当neighbours(s)包含障碍时,非自然邻居可能不都能被裁剪,这时,需要强制(forced)评估这类节点。
定义1 满足以下情况,则称节点$n\in neighbour(x)$是强制的:
- n不是x的自然邻居
- len(<p(x),x,n>) < len(<p(x),…,n>\x)
如上图(b),直线移动的例子中n=3是强制的。而上图(d)中,n=1是强制的。
定义2 对于$y=x+k\vec{d}$,如果使得k最小,并且满足以下条件之一,则称节点y是从x出发,沿着方向$\vec{d}$的跳跃点。
- y是终点
- 根据定义1,y有至少一个强迫评估的邻居
- $\vec{d}$是对角线移动并且存在一个节点$z=y+k_i\vec{d_i}$(其中$k_i\in N$、$ \vec{d_i}\in {\vec{d_1},\vec{d_2}} $),使得在条件1和条件2下z是y的跳跃点。
上上图(b)中是条件3定义的跳跃点的例子,从x出发对角线移动至y,从y开始进行2次水平移动可以到达z,因此z是y的后继跳跃点,继而y是x的后继跳跃点。
计算单个节点的后继者的算法伪代码如下。首先,对当前节点x的邻居进行裁剪,接着对每个邻居n沿着x到n的方向尝试跳跃,将获得的跳跃点加入x的后继者中。
Require: x: current node, s: start, g: goal
successor(x)$\leftarrow\emptyset$
neighbours(x)$\leftarrow$ prune(x,neighbours(x))
for all n $\in$ neighbours(x) do
n $\leftarrow$ jump(x,direction(x,n),s,g)
….add n to successors(x)
return successors(x)
其中跳跃的算法伪代码如下。算法将初始节点沿着既定的方向移动,并检查移动后的节点是否满足定义2。满足时返回该节点(第5、7、11行),否则继续前进(第12行)。当遇到障碍或无法前进时递归结束(第3行)。
Require: x: initial node, $\vec{d}$: direction, s: start, g: goal
$n\leftarrow step(x,\vec{d})$
if n is an obstacle or is outside the grid then
….return null
if n = g then
….return n
if $\exists n’\in neighbours(n) s.t. n’$ is forced then
….return n
if $\vec{d}$ is diagonal then
….for all i $\in$ {1,2} do
……..if jump(n,$\vec{d_i}$,s,g) is not null then
…………return null
return jump(n,$\vec{d}$,s,g)
最后附上一个可以动态演示 JPS 寻路过程的网站。
参考文献
[1] S. Rabin, Game AI Pro 2: Collected Wisdom of Game AI Professionals, A K Peters/CRC Press, 2015.
[2] D. Harabor and A. Grastien, Online Graph Pruning for Pathfinding On Grid Maps, AAAI Conference on Artificial Intelligence, AAAI 2011, San Francisco, California, Usa, August DBLP, 2011.
[3] A search algorithm, https://en.wikipedia.org/wiki/A_search_algorithm.
[4] Amit, Pathfinding, http://theory.stanford.edu/~amitp/GameProgramming/.
[5] Dijkstra’s algorithm, https://en.wikipedia.org/wiki/Dijkstra%27s_algorithm.
[6] 游资网, 如何快速找到最优路线?深入理解游戏中寻路算法, http://www.gameres.com/777251.html, 2017.
[7] 萤火之森, 寻路算法-贪婪最佳优先算法, http://frankorz.com/2017/12/16/greedy-best-find-search/, 2017.